 Our new publication in ISPRS is accepted: “Decision fusion and non-parametric classifiers for land use mapping using multi-temporal RapidEye data”.
Our new publication in ISPRS is accepted: “Decision fusion and non-parametric classifiers for land use mapping using multi-temporal RapidEye data”.
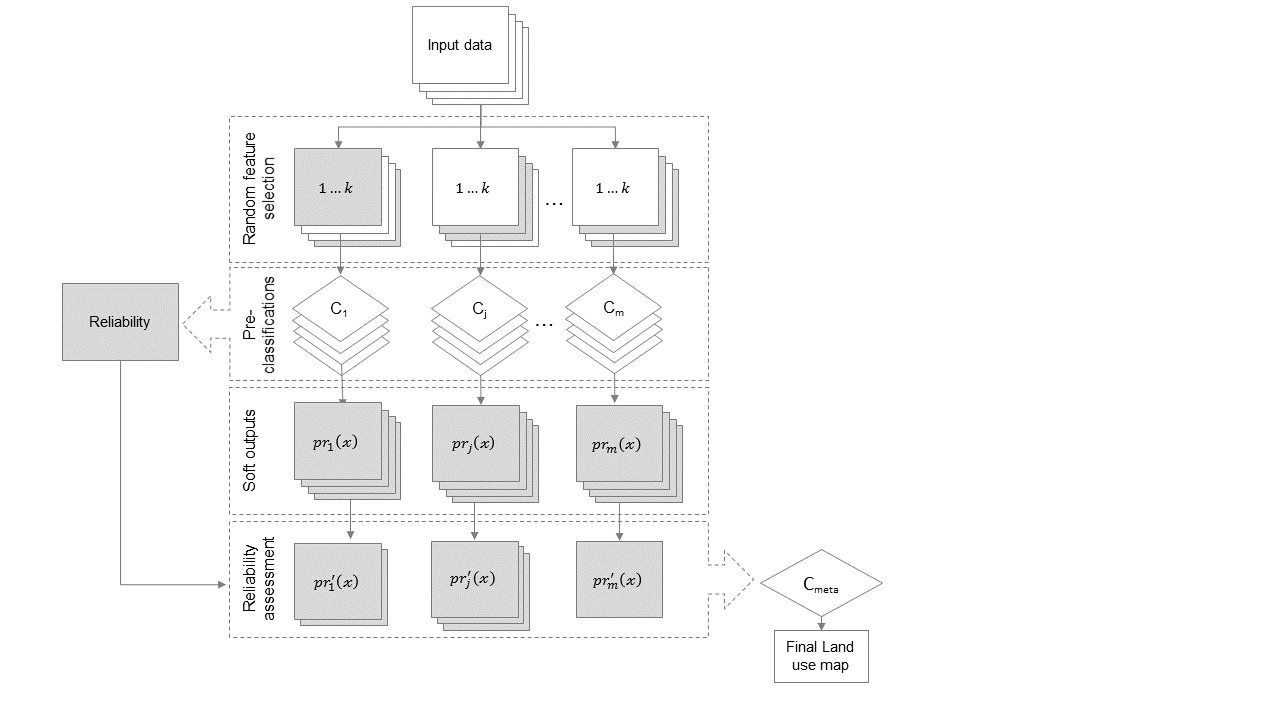
This study addressed the classification of multi-temporal satellite data from RapidEye by considering different classifier algorithms and decision fusion. Four non-parametric classifier algorithms, decision tree (DT), random forest (RF), support vector machine (SVM), and multilayer perceptron (MLP), were applied to map crop types in various irrigated landscapes in Central Asia. A novel decision fusion strategy to combine the outputs of the classifiers was proposed. This approach is based on randomly selecting subsets of the input data-set and aggregating the probabilistic outputs of the base classifiers with another meta-classifier. During the decision fusion, the reliability of each base classifier algorithm was considered to exclude less reliable inputs at the class-basis. The spatial and temporal transferability of the classifiers was evaluated using data sets from four different agricultural landscapes with different spatial extents and from different years. A detailed accuracy assessment showed that none of the stand-alone classifiers was the single best performing. Despite the very good performance of the base classifiers, there was still up to 50% disagreement in the maps produce by the two single best classifiers, RF and SVM. The proposed fusion strategy, however, increased overall accuracies up to 6%. In addition, it was less sensitive to reduced training set sizes and produced more realistic land use maps with less speckle. The proposed fusion approach was better transferable to data sets from other years, i.e. resulted in higher accuracies for the investigated classes. The fusion approach is computationally efficient and appears well suited for mapping diverse crop categories based on sensors with a similar high repetition rate and spatial resolution like RapidEye, for instance the upcoming Sentinel-2 mission.