Category: MSc thesis

Exploring the Arctic: Eagle MSC Students Lena and Ronja Conducting UAS Research
The Arctic is one of the most extreme and fascinating environments on Earth, offering an...
Read More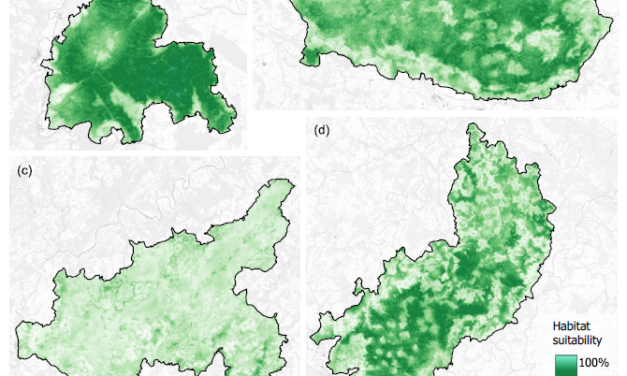
EAGLE Master Thesis Defense “Linking Wildlife Conservation to Nature’s Contributions to People: A Case Study for the European Wildcat (Felis silvestris silvestris) in German Protected Forests”
On January 21, 2025, Svenja Dobelmann will defend her master thesis” Linking Wildlife...
Read More
Successful Master’s thesis defense by Prince Lartey Lawson
Our EAGLE Prince Lartey Lawson successfully defended his Master’s thesis today (April 30th)...
Read More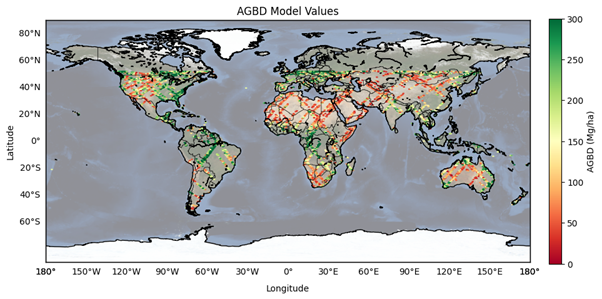
Master Thesis Defense: “CNN-based Global Aboveground Biomass Estimation using Sentinel-2 and GEDI” on Tuesday, March 12, 2024
On Tuesday, March 12, at 12:00 Ka Hei Chow will present her master thesis on ”...
Read More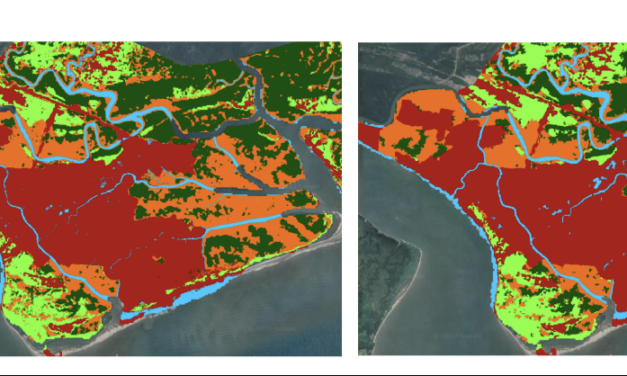
Master Thesis Defense: “Assessing the Mangrove Ecosystem in Eastern Obolo, Niger Delta” on Monday, March 18 at 11:30
On Monday, March 18, at 11:30 Hyeonmin Kang will present her master thesis on “Assessing the...
Read More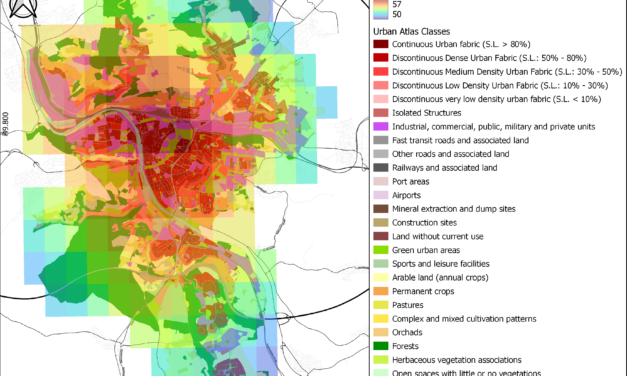
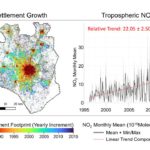
Master Thesis Defense: “Assessing Air Pollution in Urban Environments: A Comprehensive Analysis Using Earth Observation and In Situ Measurements” on Friday, March 08 at 13:00
On Friday, March 08, at 13:00, Andreas Bury will present his master thesis on...
Read More
Successful Field Work Campaign in Akagera NP, Rwanda
From 6th November until 20th November 2023 an intensive field campaign for mapping invasive plant...
Read More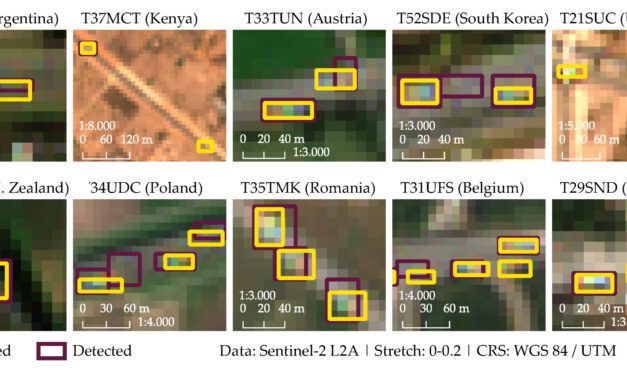
new publication Detecting Moving Trucks on Roads Using Sentinel-2 Data
Our EAGLE student Henrik Fisser published his M.Sc. thesis “Detecting Moving Trucks on Roads...
Read More
Department of Remote Sensing awarded for insect-friendly cooperation
For German version see below Together with other collaborative partners, the Department of Remote...
Read More
Call for Master’s thesis at the Department of Remote Sensing
In situ and radar-based assessment and analysis of the surface soil moisture and its dynamic in the agrarian landscape in South Italy
Objective Semi-arid to arid climate determines the natural water availability in the Mediterranean. In particular, groundwater reservoirs are the main source of freshwater in the Mediterranean region. Climate change as well as increasing water consumption in irrigated agriculture are identified as major drivers of increasing groundwater scarcity and overuse of fragile groundwater resources.
Read More
new M.Sc. thesis “animal movement prediction using environmental data”
Jakob Schwalb-Willmann just started his M.Sc. thesis titled “A deep learning movement prediction...
Read More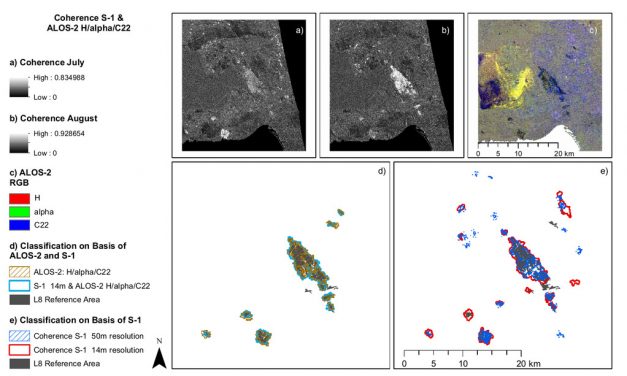
M.Sc. handed in by Susanne Karg on burn scar detection with ALOS data
Susanne Karg handed in her M.Sc. thesis “Burn Scar Detection Using Polarimetric ALOS-2...
Read More